
During the International City Logistics Conference 2019 Matthew J. Roorda (University of Toronto) presented his research on vehicle routing problems (VRP) with movement synchronization of drones, sidewalk robots, or foot-walkers (the ‘driver helper’). The VRP extension with movement synchronization (VRPMS) has potential applications of drone and robot technologies to assist with the delivery of parcels.
VRPMS seeks the optimal route for a set of composite resources, e.g. delivery van with drones, or delivery van with sidewalk robots. This paper proposes an exact formulation of the problem, and a metaheuristic approach to solve larger instances of the VRPMS in order to assess the economic benefits of the different technologies.
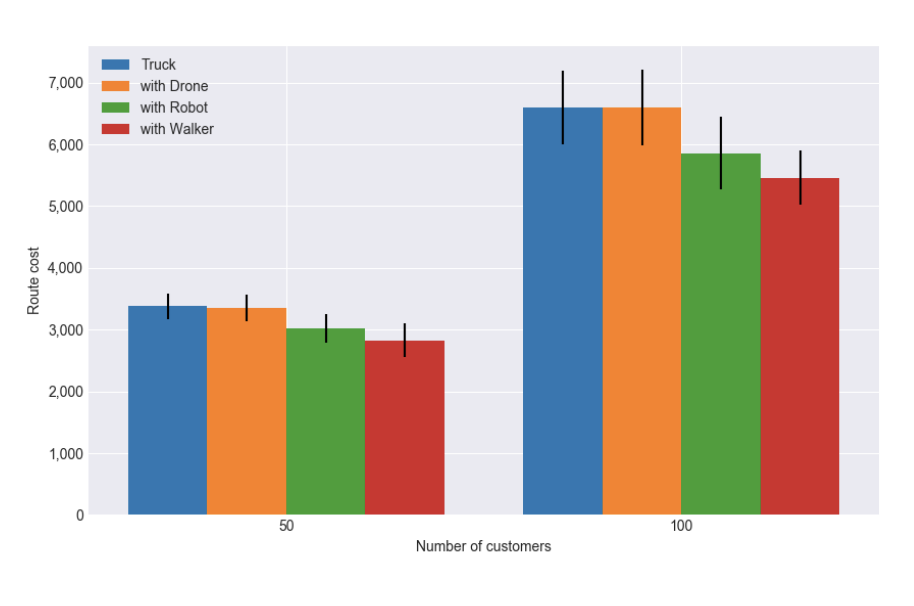
This research proposes an exact formulation of the problem, and a metaheuristic approach to solve larger instances of the VRPMS in order to assess the economic benefits of the different technologies. The numerical analysis demonstrates that the sidewalk robot and the foot-walker technology alternatives have greater cost saving potentials than the drone technology alternative. However, depending on the future development of technology, drones can still be a viable solution to assist the delivery of parcels.
Check out the results of the research here.